Here are several videos of the simulator in action, in many different configurations. To view these videos you will need a media player that can play either Quicktime (with H.264 codec) files or DivX-encoded AVI files. The Quicktime videos are much higher quality.


Green vehicles are human-driven, while white and yellow vehicles are autonomous with and without reservations, respectively. Emergency vehicles, if present, alternate between blue and red. Each simulation models a 250m by 250m area with 3 lanes traveling in each direction. The speed limit for vehicles is 25m/s. The left lane is only for left turns, the right lane is only for right turns, and the center lane only for vehicles going straight. In all three-lane examples, vehicles are spawned in the left, center, and right lanes with probability 0.15, 0.7, and 0.15, respectively. Delays presented are not from the experiments for which these videos were made, but rather from experiments that ran for much longer (and thus have more reliable results).
In addition, we developed a mixed reality platform in which a real autonomous vehicle can interact with the virtual vehicles in the simulator. Here is a video introducing the platform (from the IROS 2010 paper available from the main page).
| Intersection control policy: | FCFS |
| Light model: | N/A |
| Drivers: | Autonomous |
| Spawn probability: | 0.05 |
| Emergency Vehicles: | 0% |
| Average delay: | 1.33s |
This is the standard FCFS policy. It is extremely efficient if all vehicles are autonomous. Because it does not have a light model (the lights are always red), however, it is not usable by humans. At this level of traffic, the human-usable intersection control policies can't move the traffic through the intersection faster than it arrives.
| Intersection control policy: | FCFS |
| Light model: | N/A |
| Drivers: | Autonomous |
| Spawn probability: | 0.20 |
| Emergency Vehicles: | 0% |
| Average delay: | undetermined |
Here, FCFS is managing a huge intersection with tons of traffic. Even with the extremely high level of traffic, FCFS is able to keep the delay very low. The granularity of this FCFS policy is 96 due to the very large number of lanes.
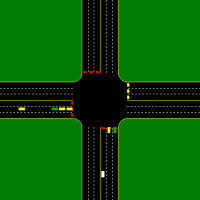
| Intersection control policy: | FCFS-Light |
| Light model: | All-Lanes |
| Drivers: | 100% Human |
| Spawn probability: | 0.01 |
| Emergency Vehicles: | 0% |
| Average delay: | 20.10s |
This is the FCFS-Light imitating a traffic light for fairly light traffic. Because all the drivers are human, the intersection behaves exactly as a traffic light would (if it had this specific pattern of lights). At this level of traffic, the policy can keep the lanes clear.
| Intersection control policy: | FCFS-Light |
| Light model: | All-Lanes |
| Drivers: | 100% Human |
| Spawn probability: | 0.03 |
| Emergency Vehicles: | 0% |
| Average delay: | 77.29s |
This is the FCFS-Light imitating a traffic light at a higher level of traffic. As seen in this video, the intersection manager can't keep up with all the traffic - the lanes have more and more cars left over after each green light.
| Intersection control policy: | FCFS-Light |
| Light model: | Single-Lane |
| Drivers: | 99% Autonomous, 1% Human |
| Spawn probability: | 0.04 |
| Emergency Vehicles: | 0% |
| Average delay: | 17.39s (autonomous), 43.52s (human) |
This video showcases the ability of the autonomous drivers to take advantage of the reservation part of the FCFS-Light policy. In particular, the fact that the Single-Lane light model does not have many green lights at any given time leaves more room open for the autonomous vehicles. The percentage of human drivers is fairly low, but one shows up at 0:24 in the center southbound lane. Note how it is not able to proceed through the intersection until the green light makes its way around to the center southbound lane.
| Intersection control policy: | FCFS-Light |
| Light model: | Single-Lane |
| Drivers: | 95% Autonomous, 5% Human |
| Spawn probability: | 0.04 |
| Emergency Vehicles: | 0% |
| Average delay: | 44.86s (autonomous), 76.23s (human) |
This video highlights how the Single-Lane light model fails when there are too many human drivers. The human-driven vehicle that arrives in the center eastbound lane at 0:10 luckily makes it through the light. The other human drivers (one at 0:03 in the center northbound lane and one at 0:31 in the left southbound lane) are not so fortunate - they just miss their green lights and wind up holding up a lot of traffic. Once the light gets back around to them, their lanes will clear out, but if there are too many human drivers, there won't be enough time between them to clear out any backed up lanes. This is what eventually happens at this setting.
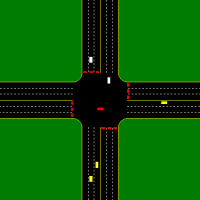
| Intersection control policy: | FCFS-Light |
| Light model: | All-Lanes |
| Drivers: | 50% Human, 50% Autonomous |
| Spawn probability: | 0.01 |
| Emergency Vehicles: | 0% |
| Average delay: | 16.46s (autonomous), 19.40s (human) |
With the All-Lanes light model, there are very few paths through the intersection not in use by a light at any given time. This limits the opportunities for the autonomous vehicles to take advantage of the reservation system. However, as can be seen in this video, they can make right turns at red lights without needing to stop, which makes a significant difference.
| Intersection control policy: | FCFS-Emerg |
| Light model: | N/A |
| Drivers: | Autonomous |
| Spawn probability: | 0.05 |
| Emergency Vehicles: | 1% |
| Average delay: | 1.42s (all), 0.97s (emergency) |
In the emergency vehicle scenarios, the emergency vehicles are very rare. However, in this video we have increased them to 1% to make them easier to capture. Notice that at 0:14 an emergency vehicle arrives in the center eastbound lane. From that time until 0:21, when the vehicle finishes crossing the intersection, no vehicle (except those in that same lane) are granted reservations. After 0:21, many vehicles are granted reservations in rapid succession. The emergency vehicles are very rare and the FCFS-Emerg policy is already very efficient with non-emergency vehicles (in the absence of emergency vehicles it is precisely the FCFS policy). However, once emergency vehicles are introduced, they do get through the intersection slightly quicker than non-emergency vehicles.
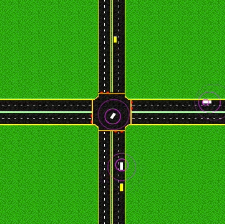
| Intersection control policy: | V2V |
In the above video, an intersection is controlled entirely by the Vehicle-to-Vehicle (V2V) protocol. Vehicles emit an expanding purple circle whenever they broadcast a message. Vehicles turn white once they have held a permissible Claim for at least 1/2 second (the minimum time before a vehicle can cross). There are four different types of vehicles, (although they are hard to distinguish in the video): a coupe, a sedan, an SUV, and a van. Each has appropriate performance characteristics and physical dimensions. Toward the beginning of the video, vehicles mostly make it through without having to stop or slow significantly (although many do slow somewhat). In the later part of the video, enough traffic has accumulated at the intersection that many vehicles are forced to stop and wait. At this point, the vehicles automatically cluster into groups whose paths do not conflict, and then cross the intersection. There is no explicit grouping going on - vehicles are finding the earliest time they can cross without conflicting with a vehicle that has a permissible claim that dominates its own.
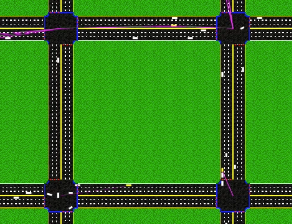
| Intersection control policy: | FCFS, multi-intersection |
In this video, you can see multiple intersections, each controlled with a Vehicle-to-Intersection (V2I) system. The purple lines show point-to-point communications. Yellow vehicles do not have confirmed reservations. White vehicles do have confirmed reservations. Notice that vehicles keep their reservations (stay white) until they are past the Admission Control Zone (ACZ) of the intersection they just traversed. At that point, they communicate back to the intersection to inform it that they have left the ACZ. Soon after, they make a new reservation with the next intersection.

 All content © 2006 Kurt Dresner.
Maintained by Tsz-Chiu Au.
This page last modified Oct 04, 2010.
All content © 2006 Kurt Dresner.
Maintained by Tsz-Chiu Au.
This page last modified Oct 04, 2010.