The FLAT 2-D Robot Simulator
NOTE: Active development and maintenace of FLAT have ceased.
We recommend that those seeking a high-quality 2D robot simulator use Stage.
Overview
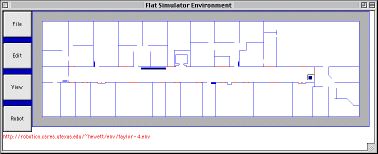
Flat simulates an RWI robot - a circular, sonar-guided robot -
in a flat 2D world. It contains an accurate physical simulator
and accurate sonar and laser rangefinder simulators.
The simulated robot has internal odometry, one or two laser
rangefinders, and 12 sonar sensors.
You can design your own 2D floor plan to simulate a building
or space.
The user implements control laws that govern the robot's
motion behavior. See Getting Started with Flat.
Current Status (August, 2000)
The current version of Flat is Flat4 is in constant use
by several people in the Robot Lab. The laser rangefinder code
contains analysis routines to extract line segments, blobs, doorways
and other information from the laser rangefinder data.
See the Flat4 documentation for further information.
Currently, Flat5 is a new Java-based display that greatly enhances the
simulation display and also allows the user to overlay their results
on the sensor output. See the Flat5 documentation.
Documentation and Source
History
Flat was developed in 1994-95 by Hiep Nguyen, with contributions
from Wun-Yik Lee.
The sonar model was implemented by
Bert Kay.
In Spring of 1999,
Mike Hewett
and Emilio Remolina
updated Flat and fixed many bugs. The major changes include correct
simulation and scaling, a new display, laser rangefinder simulation
and a distributed implementation.
Here is the current to-do list for Flat.
[Robotics Home]
Author: Micheal
S. Hewett
Email: hewett@cs.utexas.edu
Last Updated: Monday, February 15, 1999