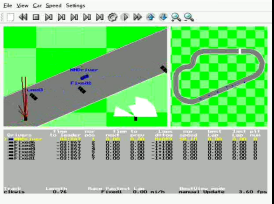
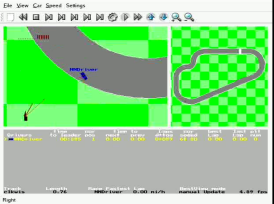
5. Moving obstacles, laser
rangefinder and radar input. In this case, the other cars on the
road are moving, and avoiding them requires integrating information
over time. The movie shows the driver's perspective. (The rangefinders
and radars are not shown.) |
|

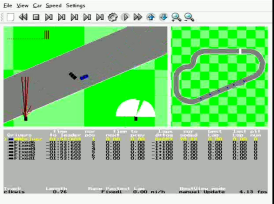
6. Stationary obstacles, visual input. The input
consists of a 20 x 18 gray-scale pixel values only (no rangefinder or
radar input), shown in the bottom left in the second half of the
movie. Even with such coarse input, the networks learned to warn about
running off the road and about collisions.
|