Physical Robots
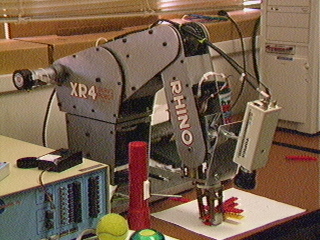
- We have a Rhino Robots XR-4 arm connected to their Mark-IV controller. The picture depicts the arm with our Topica color camera mounted on top. Our initial goal is to be able to locate, identify, and manipulate small objects composed of legos (including single blocks).
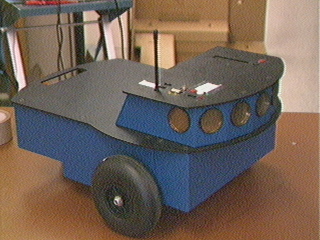
- Tommy is a Real World Interfaces (RWI) Pioneer with seven Poloroid sonars arranged along the front. This makes it blind to the rear, and, when coupled with the physical shape of the robot (not symmetric along its vertical axis) makes controlling this robot more difficult than Spot. However the programming interfaces are somewhat cleaner. The manufacturer provides subroutine libraries which establish a packet based communication link between a host and the robot using a built in radio modem. These libraries maintain a mirror of the robot's current state on the host, and allow the communication of movement commands to the robot.
- Spot is a Real World Interfaces (RWI) B12 robot with 12 Polariod sonars arranged in a lateral ring. It is capable of turning in place and can communicate through a number of serial ports. It is controlled by an onboard Linux system. For remote data collection, we have a pair of external radio modems.

- Vulcan (Robotic Wheelchair)
[Robotics Home]
Author: Patrick Beeson