My research interests include developmental robotics, computational perception, and service robotics. Below is a partial list of past and current research projects.
Curriculum Learning for RL Agents (2014-present)
In transfer learning, training on a source task is leveraged to speed up or otherwise improve learning on a difficult target task. The goal of this project is to develop methods that can automatically construct a sequence of source tasks -- i.e., a curriculum -- such that performance and/or training time on a difficult target task is improved.
Selected Publications:
Source Task Creation for Curriculum Learning
To appear in proceedings of the 2016 ACM Conference on Autonomous Agents and Multi-Agent Systems (AAMAS) [PDF]
Learning Inter-Task Transferability in the Absence of Target Task Samples
In proceedings of the 2015 ACM Conference on Autonomous Agents and Multi-Agent Systems (AAMAS), Istanbul, Turkey, May 4-8, 2015. [PDF]
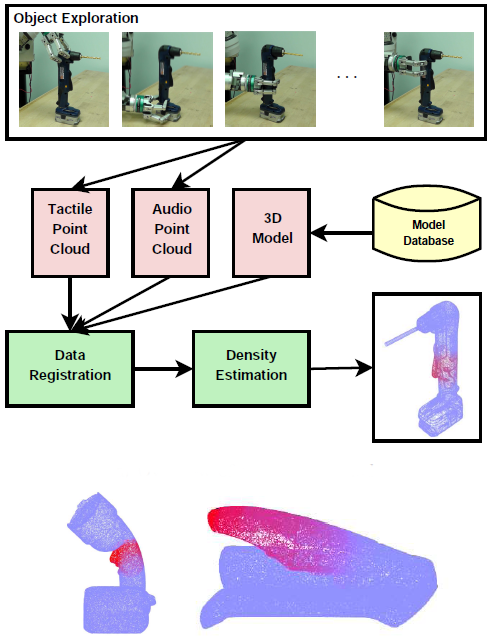
Developmental Learning of Object Properties (2009-present)
This research introduced a framework for object perception and exploration in which the robot's representation of objects is grounded in its own sensorimotor experience with them. In this framework, an object is represented by sensorimotor contingencies that span a diverse set of exploratory behaviors and sensory modalities. The results from several large-scale experimental studies show that the behavior-grounded object representation enables a robot to solve a wide variety of tasks including recognition of objects based on the stimuli that they produce, object grouping and sorting, and learning category labels that describe objects and their properties.
Selected Publications:
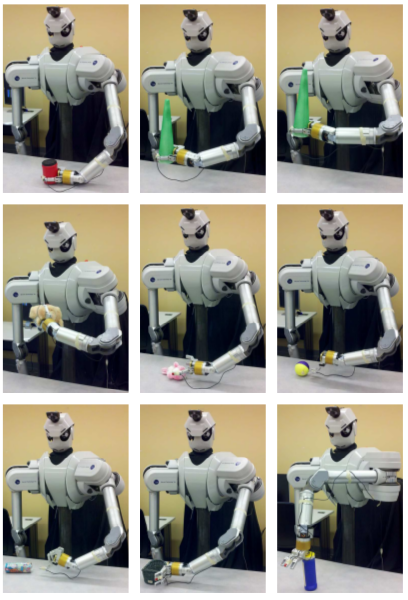
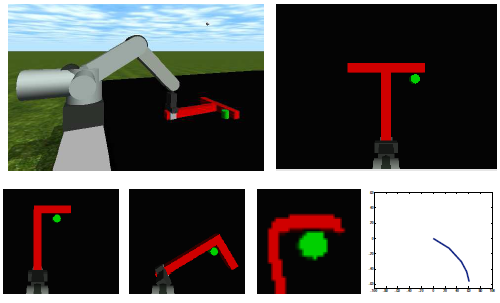
Autonomous Robotic Manipulation of Hand-Held Tools (2011)
During the Summer and Fall of 2011, I worked on the DARPA funded Autonomous Robotics Manipulation (ARM-S) project. The goal was to enable a 2-armed upper-torsoe humanoid robot with the ability to grasp objects and use tools (e.g., a hand-held drill, a flashlight, a stapler, etc.). My focus was on developing methods that allow a robot to discover the functional componentes of objects (e.g., the button on the hand-held drill) using exploratory behaviros and multi-modal perception.
Selected Publications:
Adaptive Robotic Tool Use Under Variable Grasps.
Robotics and Autonomous Systems, Vol. 62, No. 6, pp. 833-846, June 2014. [Link]
Interactive Audio-Tactile Annotation of 3D Point Clouds for Robotic Manipulation
Presented at the 2013 ICRA Workshop on Mobile Manipulation: Interactive Perception, Karlsruhe, Germany, May 6, 2013. [Abstract]
Learning the Acoustic Properties of Objects (2008-2010)
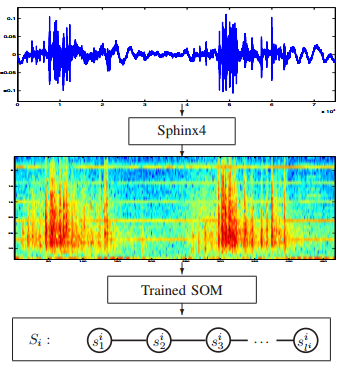
Natural sound provides important cues about objects -- we can typically identify an object's material, size, and various other properties based on the sounds that the object generates during contact with other objects. The goal of this project is to enable a robot to use natural sound as a source of information about the objects the robot interacts with.
Selected Publications:
From Acoustic Object Recognition to Object Categorization by a Humanoid Robot
In proceedings of the "Mobile Manipulation" workshop held at the Robotics Science and System Conference, 2009. [PDF]
Interactive Learning of the Acoustic Properties of Household Objects
In proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA). [PDF] [Link]
Autonomous Learning of Tool Affordances (2006-2009)
Our ability to use external objects as tools is one of the hallmarks of human intelligence. The goal of this project is to enable robots to learn the affordances of tools in the context of reaching tasks.
Publications:
Detecting the Functional Similarities Between Tools Using a Hierarchical Representation of Outcomes
In proceedings of the IEEE International Conference on Development and Learning (ICDL 2008) [PDF] [Link]
Learning and Generalization of Behavior-Grounded Tool Affordances
In proceedings of the IEEE International Conference on Development and Learning (ICDL 2007) [PDF] [Link]
Prediction of protein binding and post-translational modification sites (2007-2009)
The goal of this project is to develop novel machine learning methods for detecting individual protein sites that have a target characteristic. More specifcally, we focused on two problems: 1) predicting Glycosylation sites; and 2) predicting protein-protein interaction sites.
Selected Publications:
Mixture of experts models to exploit global sequence similarity on biomolecular sequence labeling
BMC Bioinformatics, 2009 10:S4 [Link]
BMC Bioinformatics, 2007 8:438 [Link]