Qixing Huang
Hybrid 3D Representations
|
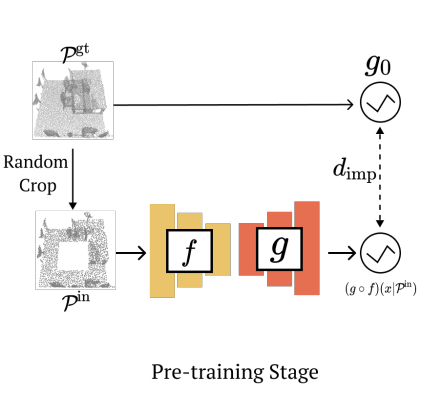
[ARIV23] Haitao Yang, Xiangru Huang, Bo Sun, Chandrajit Bajaj and Qixing Huang. 3D Feature Prediction for Masked-AutoEncoder-Based Point Cloud Pretraining. arXiv preprint arXiv:2304.10523 |
|
[ICCV23] Siming Yan, Zhenpei Yang, Haoxiang Li, Li Guan, Hao Kang, Gang Hua,and Qixing Huang. Implicit Autoencoder for Point Cloud Self-supervised Representation Learning. International Conference on Computer Vision (ICCV) 2023 |
|
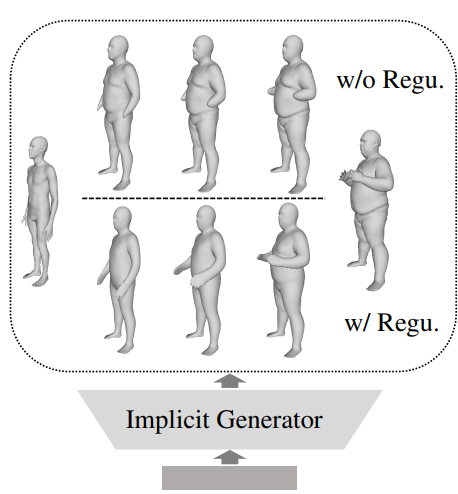
[ICCV21a] Bo Sun, Xiangru Huang, , Zaiwei Zhang, Junfeng Jiang, Qixing Huang, and Chandrajit Bajaj. ARAPReg: An As-Rigid-As Possible Regularization Loss for Learning Deformable Shape Generators. International COnference on Computer Vision (or ICCV) 2021. |
|
[ICCV21b] Haitao Yang, Zaiwei Zhang, Siming Yan, Chongyang Ma, Haibin Huang, Yi Zheng, Chandrajit Bajaj, and Qixing Huang. Scene Synthesis via Uncertainty-Driven Attribute Synchronization. International Conference on Computer Vision (or ICCV) 2021. |
|
[ICCV21c] Siming Yan, Zhenpei Yang, Chongyang Ma, Haibin Huang, Etienne Vouga, and Qixing Huang. HPNet: Deep Primitive Segmentation Using Hybrid Representations. International Conference on Computer Vision (or ICCV) 2021. |
|
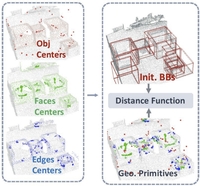
[ECCV20] Zaiwei Zhang, Bo Sun, Haitao Yang, and Qixing Huang. H3DNet: 3D Object Detection Using Hybrid Geometric Primitives. European Conference on COMPUTER VISION ( ECCV ) 2020. |
|
[TOG20] Zaiwei Zhang, Zhenpei Yang, Chongyang Ma, Linjie Luo, Alexander Huth, Etienne Vouga, and Qixing Huang. Deep Generative Modeling for Scene Synthesis via Hybrid Representations ACM Transactions on Graphics, 39(2), 2020. |
|
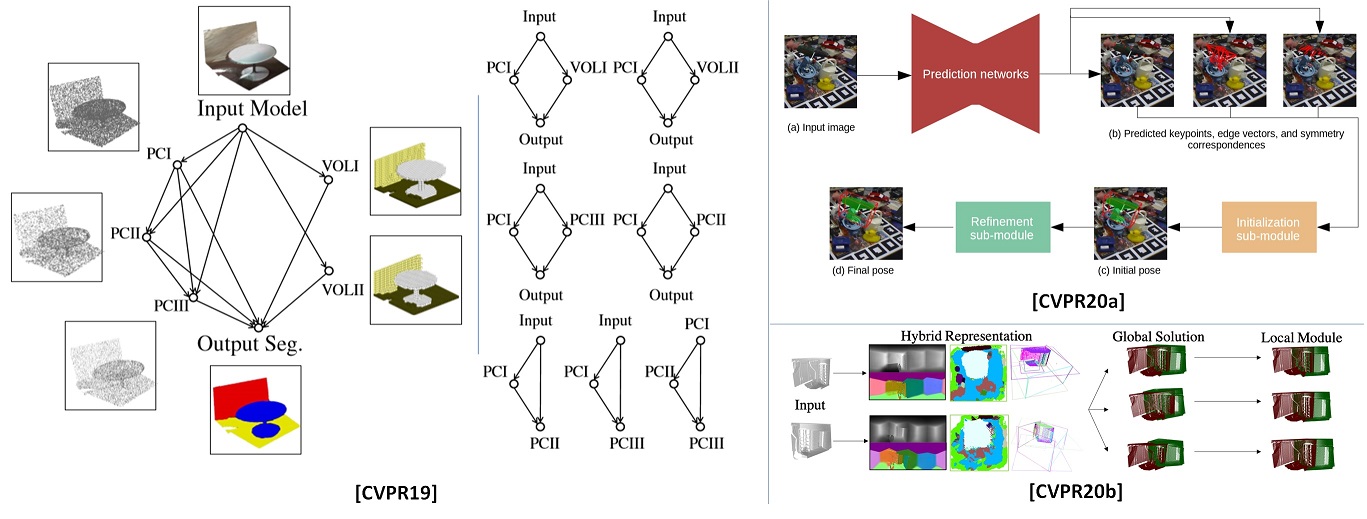
[CVPR20a] Chen Song, Jiaru Song, and Qixing Huang. HybridPose: 6D Object Pose Estimation under Hybrid Representations Computer Vision and Pattern Recognition (or CVPR) 2020. |
|
[CVPR20b] Zhenpei Yang, Siming Yan, and Qixing Huang. Extreme Relative Pose Network under Hybrid Representations Computer Vision and Pattern Recognition (or CVPR) 2020. Oral Presentation . |
|
[NeurIPS19] Leonidas Guibas, Qixing Huang. and Zhenxiao Liang. A Condition Number for Joint Optimization of Cycle-Consistent Networks. Advances in Neural Information Processing Systems(NIPS), 2019. Spotlight Presentation |
|
[CVPR19] Zaiwei Zhang, Zhenxiao Liang, Lemeng Wu, Xiaowei Zhou, and Qixing Huang. Path-Invariant Map Networks. Computer Vision and Pattern Recognition (or CVPR) 2019. Oral Presentation and Best Paper Finalist . |